Die wohl häufigsten Montierungskonstruktionen für den Selbstbau sind die Dobson- und die Deutsche Montierung. Erstere ist vorwiegend für den visuellen Einsatz vorgesehen. Für den fotografischen Einsatz kommt exklusiv die Deutsche Montierung zum Zug und da muss bereits bei der Konstruktion einiges berücksichtigt werden, damit eine gut nachgeführte Astrofotografie überhaupt möglich sein wird.
Da man Fehler nicht unbedingt nachmachen muss, erwähne ich hier meine Überlegungen und Erfahrungen, die ich bei den Arbeiten an meiner „ursusmajor“ machen konnte.
Vorabklärungen

Es versteht sich von selbst, dass für das Fertigen einer Deutschen Montierung Zugang zu entsprechenden Maschinen und Werkzeugen unabdinglich ist. Bohr-, Dreh- und Fräsmaschinen sind ebenso notwendig wie Schweiss-, Schleif- und Messapparate.
Vorweg muss Folgendes bekannt sein:
- Für welch eine Nutzlast muss die Montierung ausgelegt werden? Hauptgerät, Leitrohr, Sucher, Zubehör wie Flip Mirror, Off Axis Guider, Kamera(s), Filterrad, Barlows oder Shapleys, diverse Adapter, Tariergewichte in Elevation und Künftiges, wie z.B. Astrograf, Solarbeobachtung, Motorfokus.
- Art des Teleskops: Refraktor (Hebelwirkung, Einblickort), Newton (Einblickort), oder Katadiopter (Einblickort)
- Standort (Windverhältnisse)
Denken Sie daran, dass rasch Einiges an Zusatzgewicht zusammenkommt und die Länge eines Refraktors einen nicht zu unterschätzenden Einfluss auf das Schwingverhalten des ganzen Systems haben wird. Auch Art und Ort des Okulareinblickes muss berücksichtigt werden. Wichtig ist auch der Standort; vor allem die Häufigkeit und Stärke von Wind. Ein frei stehendes Teleskop wird demzufolge Etliches mehr an Belastung von der Montierung verlangen, als das baugleiche in einer Kuppel.
Konstruktion
Achsdurchmesser: Die Basis für die Gesamtkonstruktion ist der Achsdurchmesser. Dieser bestimmt ausschliesslich die Grösse der Montierung. Der Achsdurchmesser hängt von den Belastungen ab. Dazu habe ich mir eine kleine Faustformel geschaffen, die Gewicht, Teleskoplänge und Standort berücksichtigt.
D = L/2 x G x a
D: Mindest- Durchmesser der Montierungsachsen in mm
G: Gesamtgewicht aller Komponenten (ohne Gegengewichte)
L: Länge des schwersten Teils (i.d.R. Hauptteleskop)
a: Einfluss des Windes
Normale Verhältnisse = 1.0
Sehr windige Verhältnisse = 1.2
Windstille Verhältnisse = 0.8
Als Beispiel die Daten meiner Sternwarte: Gesamt- Nutzgewicht ist 40kg (Zwei Teleskope, Astrograf und Zubehör), die Länge meines Hauptteleskops (Lichtenknecker HA150/f15) ist 2,5m und die Gegend (am Waldrand) sehr windstill. Damit ergibt sich mit dieser Faustformel einen Mindest- Achsdurchmesser von:
D = 2.5/2 x 40 x 0.8 = 40mm
Da trotz Wald doch ab und zu ein kleines Lüftlein wehen könnte und eine Montierung eigentlich nie zu stabil sein kann, entschied ich mich für einen Achsdurchmesser von 50mm. Für das Achsenmaterial verwendete ich eine Aluminiumlegierung (Korrofestal S), die ich auf eine Festigkeit von ca. 110HB vergütete. Aluminium wählte ich wegen seinem günstigen Schwingverhalten (Grosse Eigendämpfung). Die Schwingamplitude wird zwar infolge geringerer Festigkeit im Vergleich zu Stahl etwas grösser ausfallen, aber die Schwingungsdauer wird merklich kürzer sein.
Achsenlagerung: Hier gibt es verschiedene Möglichkeiten, wie sie auch von professionellen Herstellern angewendet werden. Von Gleitbüchsen über Rillenkugellagern zu Kegelrollenlagern, sowie Kombinationen dieser Lagerungsarten ist alles auf dem unübersichtlich gewordenen Markt zu finden. Ich entschied mich für die beste aber auch teuerste Lösung und verwende pro Achse zwei einreihige Kegelrollenlager. Diese haben den Vorteil, dass derer Spiel einfach durch Spannmuttern eingestellt werden kann und damit eine absolut spielfreie Lagerung möglich ist. Zudem sind diese Lager zerlegbar und ein Ausbau der Achsen – aus was für Gründen auch immer – ist einfach machbar. Durch den Innendurchmesser von 50mm ist der Aussendurchmesser des Lagers und somit die Bohrung des Achsenkreuzes (90mm) gegeben.
Achsenkreuz: Die Achsen sollten bezüglich eines günstigen Torsionsschwingungsverhaltens möglichst kurz sein. Die beiden Lagergehäuse des Achsenkreuzes müssen aber infolge der Kollisionsgefahr – vor allem im Zenitbereich – und bezüglich Platzverhältnisse für den Antrieb (Schneckenrad) eine gewisse Mindestlänge aufweisen. Für das Optimum sehe ich dafür den 4- bis 5- fachen Achsendurchmesser; bei meiner Montierung, die hier als Beispiel da steht: 200 bis 250mm. Als Material für den Montierungskörper wähle ich Stahl, da ich diesen mit meinen Fähigkeiten besser schweissen kann als z.B. eine Aluminiumlegierung. Das Gewicht spielt bei einem festen Einsatz eher eine untergeordnete Rolle. Für die Fertigung des Achsenkreuzes habe ich geeignete Stahlrohre verwendet, die ich möglichst rechtwinklig zu einem Kreuz zusammengeschweisst habe. Auf eine Polwiege habe ich bewusst verzichtet – die ist bei einer festen Aufstellung unnötig. Das Achsenkreuz habe ich mit etwa 47° (Breitengrad Raum Bern) mit einem Übergangstück fest auf den Grundflansch geschweisst. Feinanpassungen auf die Polhöhe kann mit Unterlagen, Stehbolzen oder Ähnlichem gemacht werden. Eine besondere Beachtung verlangt die Rechtwinkligkeit der beiden Achsen zueinander. Je weiter das Achsenkreuz von der absoluten Rechtwinkligkeit abweicht, desto ungenauer wird die Nachführung. Ich habe die vier Enden der beiden Lagergehäuserohre (nach dem Schweissen) auf einem Bohrwerk bearbeitet und anschliessend vier Aluteile gedreht, die die Kegelrollenlager aufnehmen und auf die bearbeiteten Enden aufgesetzt. Damit ist eine sehr genaue Rechtwinkligkeit gegeben.
Antrieb Stundenachse: Da ich neben dem visuellen Einsatz vorwiegend die Astrofotografie betreiben möchte, ist eine motorische Nachführung in der Stundenachse ein Muss. Hier ist – wie bei allen Herstellern die ich kenne – ein Schneckengetriebe die erste und wohl einzige Wahl. Vorteilhaft ist ein möglichst grosses Schneckenrad, damit eine grosse Untersetzung erreicht werden kann. Grenzen werden durch die Platzverhältnisse gesetzt und für diese haben auch die oben erwähnten Überlegungen bezüglich Länge der Achsen bzw. Achsengehäuse beigetragen. Da ich eine Montierung in der entsprechenden Grössenklasse zum Ausschlachten erstanden habe, verwende ich das dortige Messing- Schneckenrad mit Modul 1.0 und 189 Zähnen, was einen Durchmesser von knapp 195mm ergibt und mit Schutzgehäuse und Antrieb noch genug Platz zur Montierungssäule aufweisen wird. Die eingängige Schnecke lasse ich mir speziell zum Schneckenrad passend aus Messing herstellen und weist geschliffene Flanken auf, was zu einem günstigen Verlauf des periodischen Schneckenfehlers verhelfen wird. Die Schneckenwelle ist mit zwei Rillenkugellagern in einem U- förmigen Lagerbock untergebracht. Dieser Lagerbock ist nicht starr, sondern leicht federnd (frei hängende Aluplatte) im Antriebsgehäuse untergebracht. Diese nichtstarre Lösung hat einen sehr positiven Einfluss auf das Schwingverhalten. Der Antrieb der Schnecke übernimmt ein direkt angeschlossener Schrittmotor mit genügend grossem Drehmoment (SECM 4). Man könnte auch Untersetzungsgetriebe vorschalten und schwächere Motore verwenden. Diese Getriebe bringen aber meist „Unruhe“ in die Sinuskurve des periodischen Schneckenfehlers. Mit einer solch "ausgefransten" Sinuskurve wird sich eine PEC (Periodische Schneckenfehler- Korrektur) aber schwer tun. Ein Backlash in der Stundenachse ist weiter nicht störend, wenn die Steuerung so programmiert wird, dass bei Korrekturen in der Nachführung die Drehrichtung nie umgekehrt wird, sondern nur minimiert und bis maximal Stillstand reduziert wird. Eine leichte „Unausgewogenheit“ des Teleskops verhindert einen negativen Einfluss des Backlash bei Nachführung und Goto, da sich dadurch das Ganze immer auf derselben Seite des Getriebespiels befindet.
Antrieb Deklinationsachse: Meine Montierung ist vorwiegend für den fotografischen Einsatz vorgesehen und ich entschloss mich, auf einen Schneckenradantrieb zu verzichten und anstelle dessen einen - im Vergleich zum Schneckenantrieb viel stabileren - Tagentialarm anzufertigen, bzw. denjenigen der „Ausschlachtmontierung“ abzuändern und anzupassen. Der Antrieb erfolgt über eine Gewindespindel und dies hat bezüglich „Goto“ die Nachteile, dass sich die Drehgeschwindigkeit mit grösser werdender Aussenmittigkeit verlangsamt und der Verfahrbereich eng begrenzt ist (Total ca. 15°). Goto ist möglich, wenn die „Abstimmung“ nicht auf den Mittenbereich, sondern auf etwa 50% rechts bzw links derselben erfolgt. Zur Verwendung von Goto muss ein Referenzobjekt in der Nähe derselben Deklination (+/- 15°) wie das Zielobjekt von Hand angefahren werden – vorher sind Überlegungen nötig, bei welchem Anschlag der Tangentialarm stehen muss, damit er nicht bereits nach kurzem Weg anstellen wird. Das Zielobjekt wird sich nach dem Anfahren mit Goto praktisch nie in der Mitte vom Gesichtsfeld befinden, aber bei nicht all zu kleiner Okularbrennweite sicher immer innerhalb. Für den Antrieb wähle ich auch hier einen drehmomentstarken Schrittmotor (SECM 4), der über einen einstufigen Friktionsantrieb
(ca. 1:7) die beidseits kugelgelagerte Gewindespindel mit der gespaltenen Mutter (zum Zwecke der Spielminimierung) antreibt. Dadurch wird ein praktisch backlashfreier Antrieb gewährleistet, der sich vor allem bei Nachführkorrekturen in Deklination positiv bemerkbar machen wird.
Antrieb allgemein: Ich habe beide Achsen mit einstellbaren Rutschkupplungen versehen. Nicht um ein Blockieren der Schrittmotoren bei einer Kollision zu vermeiden (diese können monatelang blockiert unter Spannung stehen ohne Schaden zu nehmen; zudem haben diese zu wenig Kraft um Schaden anzurichten) sondern damit kann ich jederzeit das Teleskop von Hand an jede Stelle des Himmels bewegen und muss nicht mühsam im Dunkeln nach den Handrädern oder Hebeln für das Lösen oder Blockieren der Achsen suchen.
Gegengewichte: Eine Deutsche Montierung benötigt Gegengewichte. Zum Einten um den Stundenantrieb zu entlasten und zum Anderen gibt es ansonsten ein ansehnliches Biegemoment auf die Astrosäule oder das benutzte Stativ fällt gar um. Die Gegengewichte sollten möglichst nahe an der Montierung befestigt sein. Damit werden Platzverhältnisse günstiger, die Kollisionsgefahr der Gegengewichte mit Personen und umgebendem Material kleiner und infolge der kurzen Gegengewichtsstange auch das Schwingverhalten günstiger. Es braucht zwar schwerere Gewichte, wenn der Hebel kurz ist, aber die Vorteile sind insgesamt grösser. Noch ein wichtiger Sicherheitsaspekt: Die Gegengewichte werden üblicherweise auf die Gegengewichtsstange aufgeschoben und festgeschraubt. Eine Verschraubung kann sich aber lösen und wenn dann mehrere Kilo Stahl von der Gegengewichtsstange rutschen und auf Zehen oder sonst was fallen ist fertig mit Lustig. Entweder ein Querloch mit Splint oder eine Tellerschraube stirnseitig in die Gegengewichtsstange eingeschraubt, verhindert dies.
Zusatzstabilisierung: Erstaunliches an Zusatzstabilität - vorwiegend bei einem langbrennweitigen Refraktor - bringt ein Stab
, der am Refraktor (Objektivseitig) und an der Gegengewichtsstange befestigt wird (Hargreaves Strut).
Steuerung: Es gibt einige Anbieter von Montierungssteuerungen. Jede hat ihre Vorzüge und Schwachstellen und es ist nicht Sinn dieses Artikels eine Wertung derselben zu vollziehen. Ich verwendet die FS2 von Michael Koch (Astroelectronic), weil ich diese von der Sternwarte, in derer Verein ich Mitglied bin, her bereits kannte.
Eine Auswahl von der Amateurastronomie- Szene benutzte Steuerungen zur Nachrüstung bestehender oder von Selbstbaumontierungen:
FS2 ; MTS-3 ; Littlefoot
Korrosionsschutz: Eine Montierung ist im Gebrauch korrosionsfördernden Einflüssen ausgesetzt. Vor allem Feuchtigkeit setzt den vorhandenen Stahlteilen zu und diese benötigen einen entsprechenden Schutz. Das Innenleben wird durch das mit Fett gefüllte Gehäuse genügend geschützt. Für die Aussenflächen sind alle Stahlteile feuerverzinkt und ausser den Gegengewichten zusätzlich mit einem Zweikomponentenlack gespritzt worden. Die elektrischen Anschlüsse werden im Frühjahr und im Herbst mit Kontaktspray behandelt.
{kind=link}
{kind=link}
Fazit
Unter Berücksichtigung obiger Überlegungen ist es mir gelungen, eine Deutsche Montierung zu fertigen, die mit einem Eigengewicht von 40kg (ohne Gegengewichten), einer Nutzlast von ebenfalls 40kg und trotz des enormen Hebels des Lichtenkneckers von 2,5m das System nach einem Kick an den OAZ nach maximal 3-5 Sekunden ausschwingen lässt.
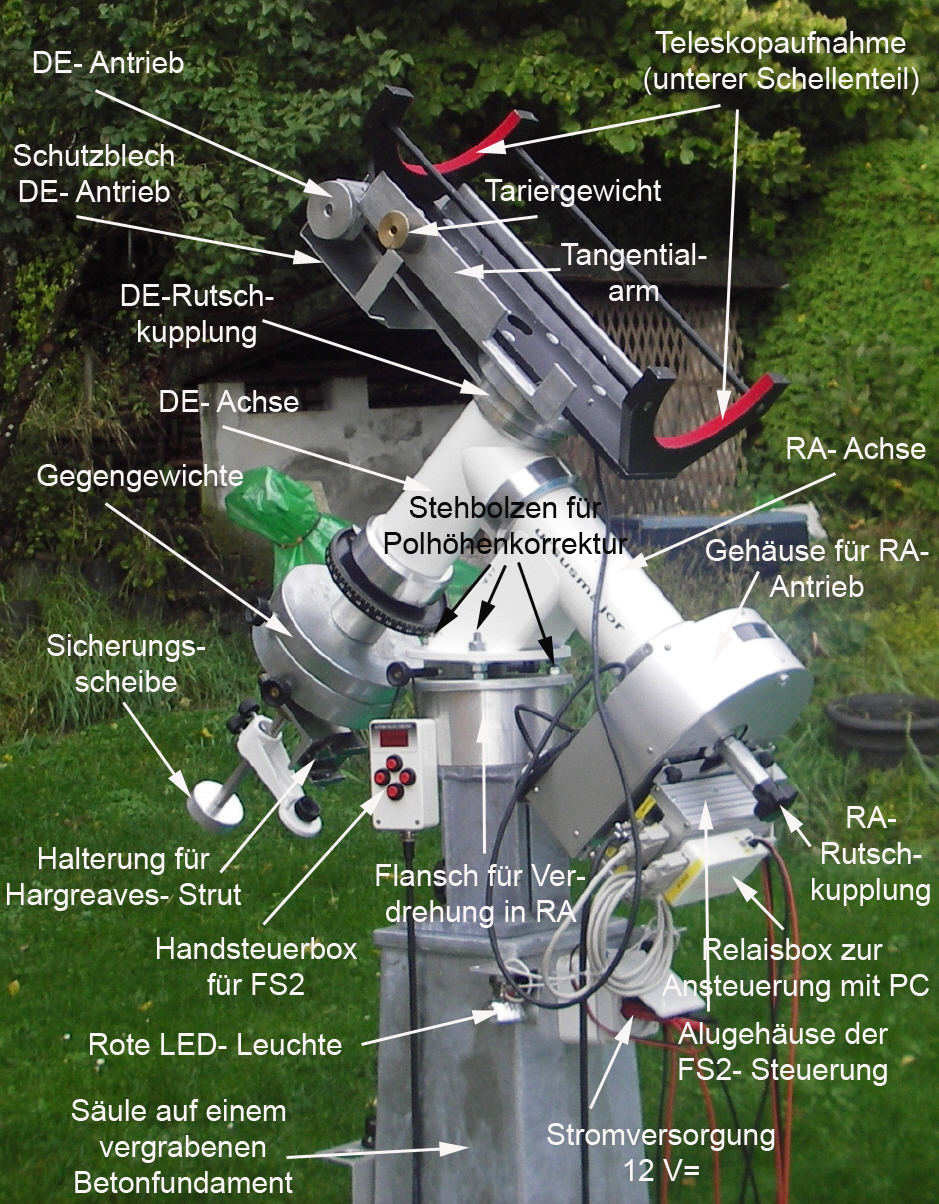
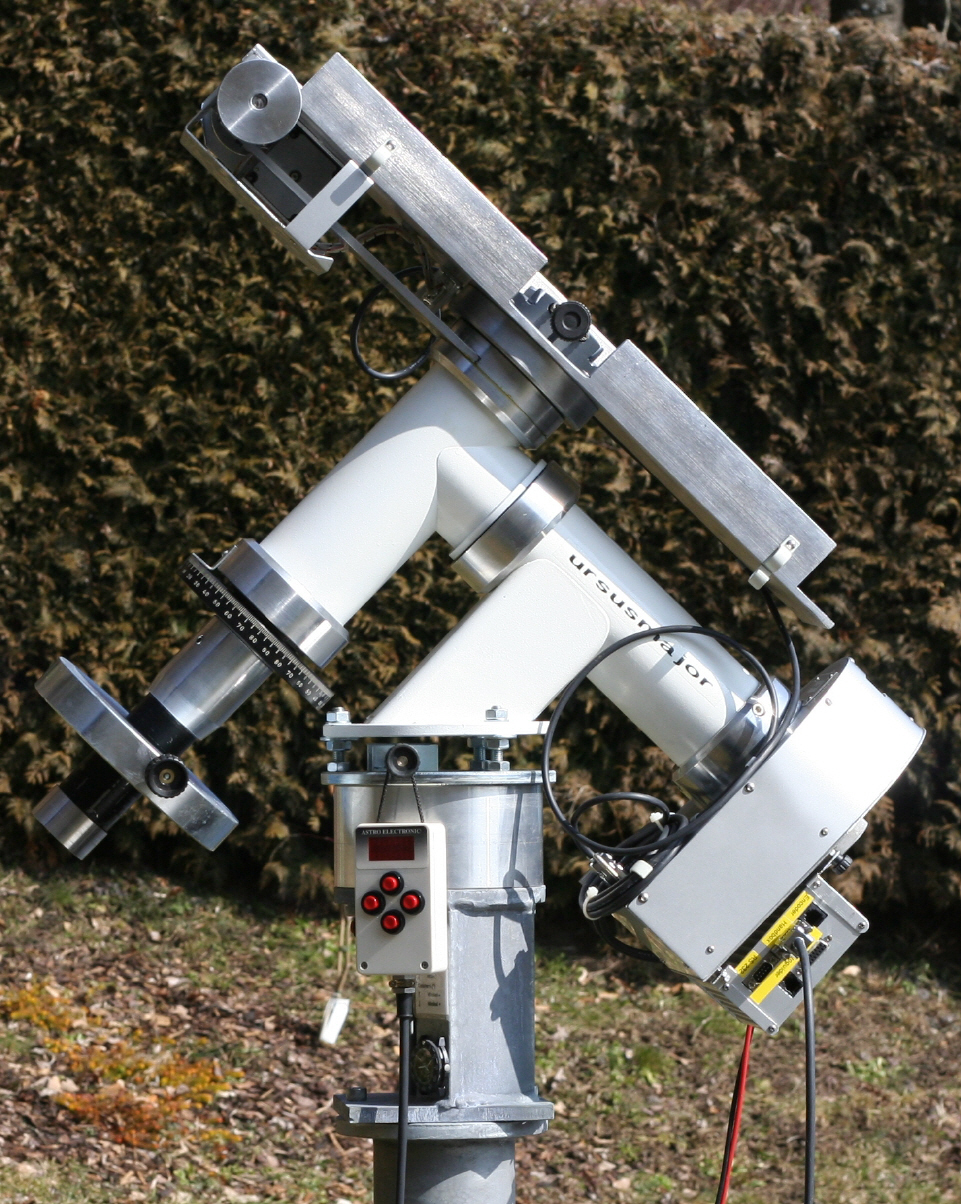
Prallaktische Montierung "Deutscher Konstruktion":
Selbstbaumontierung "ursusmajor" mit Tangentialarm, Schrittmotor- Steuerung "Astroelectronic FS2" von Michael Koch und Secm4- Schritt- Motoren. Maximalzuladung ohne Gegengewichte: 40kg bei 2,5m langem Refraktor.